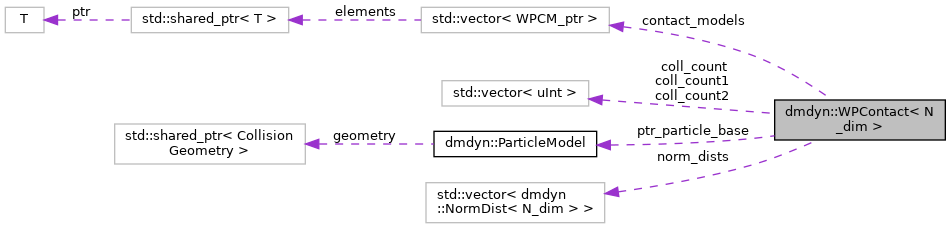
#include <WPContact.hpp>
|
| void | Init (ParticleModel **ptr_p) |
| |
| void | InitCollisionCount () |
| |
| void | AddWallObject (std::vector< algo::fcl::CollisionObject * > &collobj) |
| | Add wall object to the wpcontact manager. More...
|
| |
| void | AddWallObject (algo::fcl::CollisionObject *collobj) |
| |
| void | AddWallObjectFromBoundary (const std::vector< std::vector< Real >> &domain_size, const std::vector< std::vector< Real >> &global_domain_size, PBTypeMap &pbound_type) |
| | Add plane Wall objects from boundary dict. More...
|
| |
| void | AddWallObjectFromBoundaryOld (const std::vector< std::vector< Real >> &domain_size, const std::vector< std::vector< Real >> &global_domain_size, PBTypeMap &pbound_type) |
| |
| bool | IsInPossibleWPContacted (auto &pfield, const Real fac=1.2) |
| |
| void | ManagerSetUp () |
| |
| std::vector< NormDist< N_dim > > & | MultiDists (auto &pfield, Real fac=0.0) |
| | compute the mini_distance with walls More...
|
| |
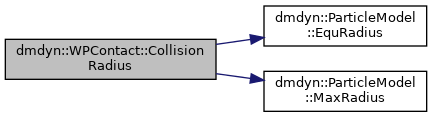
| Real | CollisionRadius (ParticleModel *p_part, const WPDetectMethod &wpmethod) |
| | the radius for collision depending on the selected wall contact method More...
|
| |
| bool | SimpleWallCollisionByCollisionRadius (ParticleField< N_dim > &pfield) |
| |
| void | WallCollisionByFullResolved (ParticleField< N_dim > &pfield, Real alpha=1.0, Real beta=0.0) |
| |
| bool | SimpleWallCollision (ParticleField< N_dim > &pfield) |
| |
| void | ContactModelListGenerate (const std::vector< std::string > &strlist, auto &ppdict) |
| |
| void | CompactNormDistsByDist (Real ds) |
| | compact norm dists and delete duplicate data by the distance among points, and return min_distances with different contant points More...
|
| |
| void | UpdateMinMeands (Real ds) |
| |
◆ PBTypeMap
◆ WPCM_ptr
◆ AddWallObject() [1/2]
template<int N_dim>
| void dmdyn::WPContact< N_dim >::AddWallObject |
( |
algo::fcl::CollisionObject * |
collobj | ) |
|
|
inline |
◆ AddWallObject() [2/2]
template<int N_dim>
| void dmdyn::WPContact< N_dim >::AddWallObject |
( |
std::vector< algo::fcl::CollisionObject * > & |
collobj | ) |
|
|
inline |
Add wall object to the wpcontact manager.
- Parameters
-
◆ AddWallObjectFromBoundary()
template<int N_dim>
| void dmdyn::WPContact< N_dim >::AddWallObjectFromBoundary |
( |
const std::vector< std::vector< Real >> & |
domain_size, |
|
|
const std::vector< std::vector< Real >> & |
global_domain_size, |
|
|
PBTypeMap & |
pbound_type |
|
) |
| |
|
inline |
Add plane Wall objects from boundary dict.
if the current block does not contain this plane wall object, this wall object will not appended in the wpcontact_manager
- Parameters
-
| domain_size | |
| global_domain_size | |
| pbound_type | |
References compgeo::eps, and dmdyn::W.
◆ AddWallObjectFromBoundaryOld()
template<int N_dim>
| void dmdyn::WPContact< N_dim >::AddWallObjectFromBoundaryOld |
( |
const std::vector< std::vector< Real >> & |
domain_size, |
|
|
const std::vector< std::vector< Real >> & |
global_domain_size, |
|
|
PBTypeMap & |
pbound_type |
|
) |
| |
|
inline |
◆ CollisionRadius()
◆ CompactNormDistsByDist()
compact norm dists and delete duplicate data by the distance among points, and return min_distances with different contant points
- Parameters
-
References blin::Distance().
◆ ContactModelListGenerate()
template<int N_dim>
| void dmdyn::WPContact< N_dim >::ContactModelListGenerate |
( |
const std::vector< std::string > & |
strlist, |
|
|
auto & |
ppdict |
|
) |
| |
|
inline |
◆ Init()
◆ InitCollisionCount()
◆ IsInPossibleWPContacted()
◆ ManagerSetUp()
◆ MultiDists()
compute the mini_distance with walls
For full resolved wall contact model, this function can return the positive mini_distances with a thresold \delta=0.1 Coll_rad for simple collision model, such as maximum and equivalent radii, only return one collide distance if the norm_dists is not empty, this means that particle is in the contact region or touch with the wall.
- Parameters
-
- Returns
- std::vector<NormDist>
References dmdyn::FullResolved, and quadpack::max().
◆ SimpleWallCollision()
◆ SimpleWallCollisionByCollisionRadius()
◆ UpdateMinMeands()
◆ WallCollisionByFullResolved()
◆ coll_count
◆ coll_count1
◆ coll_count2
◆ contact_models
◆ min_meands
◆ norm_dists
◆ ptr_particle_base
◆ wpcoll
◆ wpcontact_manager
template<int N_dim>
| algo::fcl::DynamicAABBTreeCollisionManager dmdyn::WPContact< N_dim >::wpcontact_manager |
◆ wpdist
The documentation for this struct was generated from the following file: